整车参数
| 参数类别 | 定义 |
|---|---|
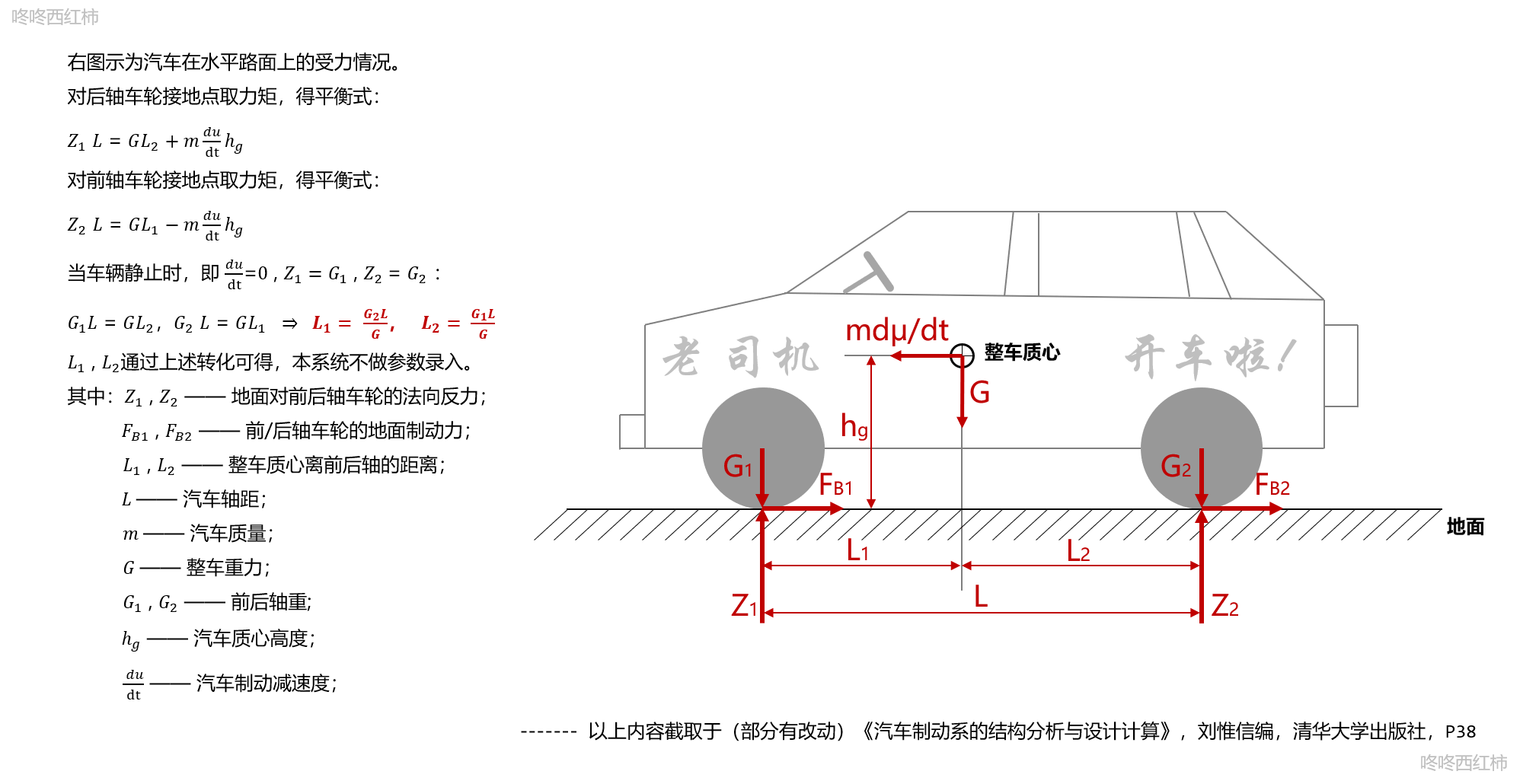
| 轴距 | 图示L |
| 静力半径 | 汽车静止时,汽车车轮中心至轮胎与道路接触面之间的距离称为静力半径 |
| 滚动半径 | 车轮滚动时用来计算的等价半径,用于计算的圆周长度等于车轮实际滚动距离 |
| 空载质量 | 整车整备质量+110kg(GB21670定义) |
| 空载前轴 | 空载质量时对应的整车前轴轴荷 |
| 空载质心 | 空载质量时对应的整车质心水平高度hg |
| 满载质量 | 车辆装载至最大设计总质量(GB21670定义) |
| 满载前轴 | 满载质量时对应的整车前轴轴荷 |
| 满载质心 | 满质量时对应的整车质心水平高度hg |
注:由于轮胎在受到静态径向载荷的作用,轮胎发生显著变形,所以轮胎静力半径小于滚动半径,静力半径用于计算静态驻车时的驻车力。
踏板参数
| 参数类别 | 定义 |
|---|---|
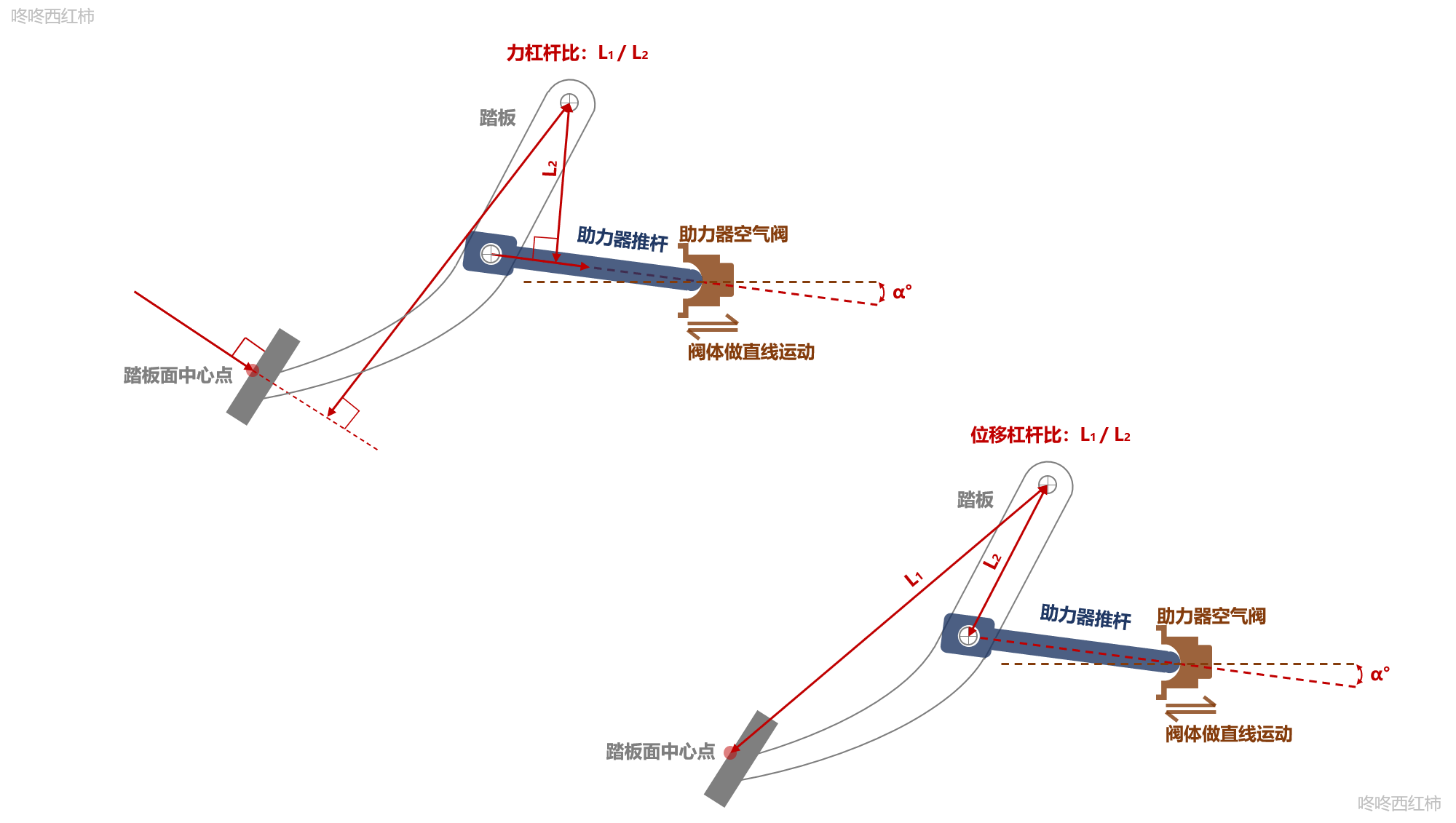
| 力杠杆比 | 见图示 |
| 位移杠杆比 | 见图示 |
注:本匹配系统中设定为定杠杆比踏板,变杠杆比踏板暂不在系统范围内。
即使是定杠杆比,因为α角的存在,在图示的定义前提下,踏板在运动过程中力的杠杆比是在不停变换的,位移杠杆比则不变。
图示中位移杠杆比实际上是针对踏板面中心和助力器推杆结合点的位移杠杆比,更合理的应该是踏板面中心与空气阀体的位移杠杆比。
图示中力杠杆比实际上是针对踏板面和助力器推杆的力杠杆比,更合理的应该是踏板面与空气阀体的力杠杆比。
后者的计算方式更为复杂,这里为了简化计算,我们使用图示定义。
助力器参数
| 参数类别 | 定义 |
|---|---|
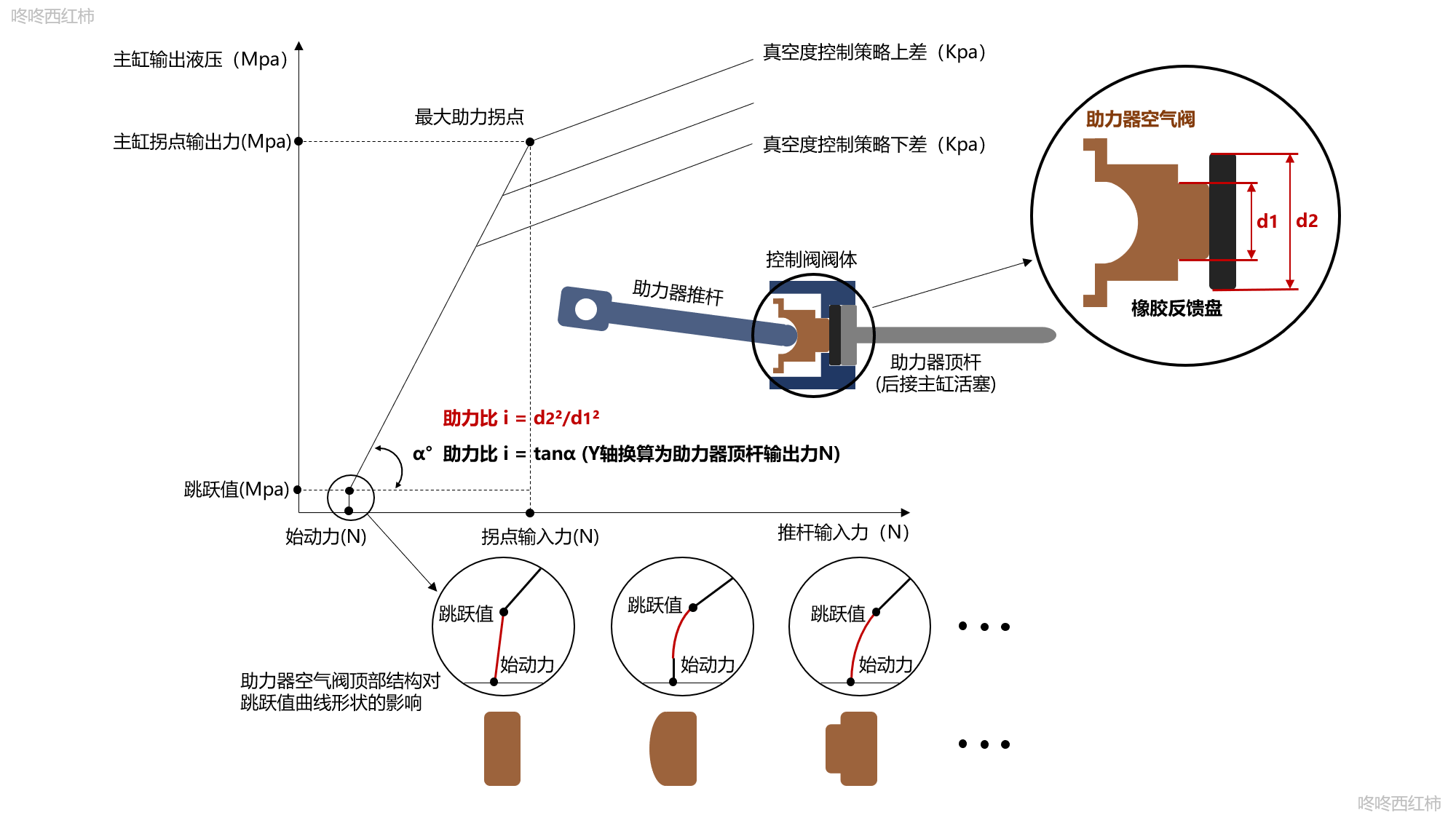
| 助力比 | 见图示 |
| 始动力 | 见图示 |
| 跳跃值 | 见图示 |
| 拐点输入力 | 对应图示最大助力拐点 |
| 拐点输出力 | 对应图示最大助力拐点 |
| 主缸直径 | 暂不解释 |
| 第一腔行程 | 暂不解释 |
| 第二腔行程 | 暂不解释 |
| 助力器空行程 | 供应商提供,一般≤2mm |
制动器参数
| 参数类别 | 定义 |
|---|---|
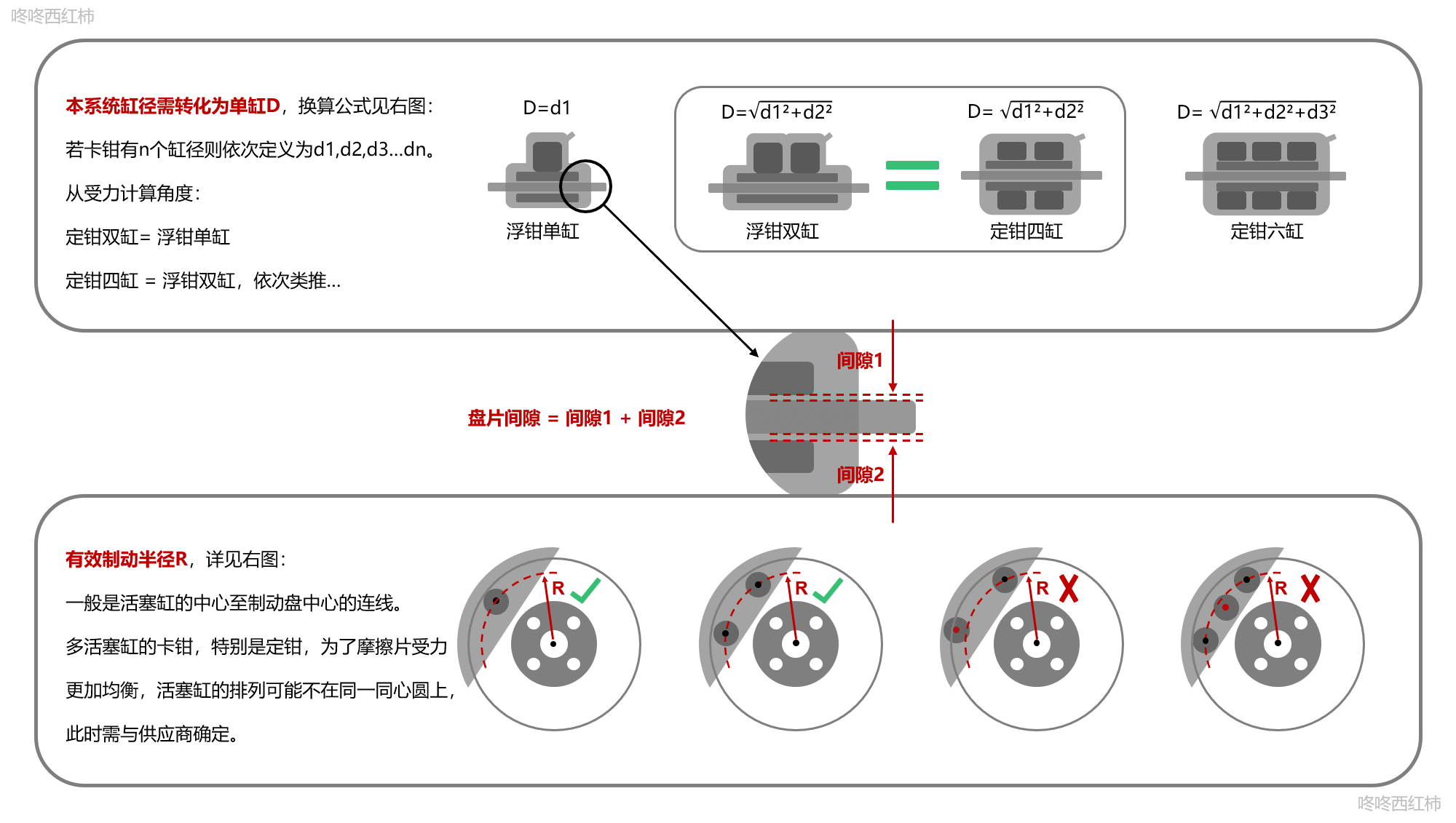
| 缸径 | 制动器活塞缸直径,图示D |
| 有效制动半径 | 图示R |
| 效能因数 | 定义为在制动盘上产生的摩擦力与输入力之比,取值:制动盘与摩擦片的摩擦系数*2 ---《汽车制动系的结构分析与设计计算》,刘惟信编,清华大学出版社,P48 |
| 盘片间隙 | 见图示 |
注:效能因数中提及的摩擦系数:这里指名义摩擦系数,摩擦系数在不同的工况下会变化,例如AK报告的十五个章节,详见制动器总成章节。
其他参数
| 参数类别 | 定义 |
|---|---|
| 制动系统机械效率 | 制动踏板机构及制动主缸的机械效率,可取0.85~0.95 ---《汽车制动系的结构分析与设计计算》,刘惟信编,清华大学出版社,P110 |
| 风阻/滚阻减速度 | 整车自由滑行时风阻和轮胎的滚动阻力产生的整车减速度 |
| 电机回馈减速度 | 这里指滑行能量回收产生的整车加速度 |
| ABS利用率 | 这里指ABS附着系数利用率,即ABS工作时的最大制动强度与附着系数的比值---GBT 13594 |
注:制动系统机械效率:
笔者的理解定义是:实际状态与理想状态下的轮端活塞缸输出力的比值。
制动踏板机构及制动主缸的机械效率只是其中一部分,还有制动液在管路中能量传递损耗,以及卡钳端的能量损失。暂未有可靠数据,按笔者羸弱的实际经验,可取制动踏板机构及制动主缸的机械效率的上差。
I&β曲线
φ-q曲线
地面法向力&管路压强
踏板感
我们使用“(踏板)力-(整车)减速度曲线”和“(踏板)位移-(整车)减速度曲线对踏板感进行量化设计与评价。
力-减速度曲线
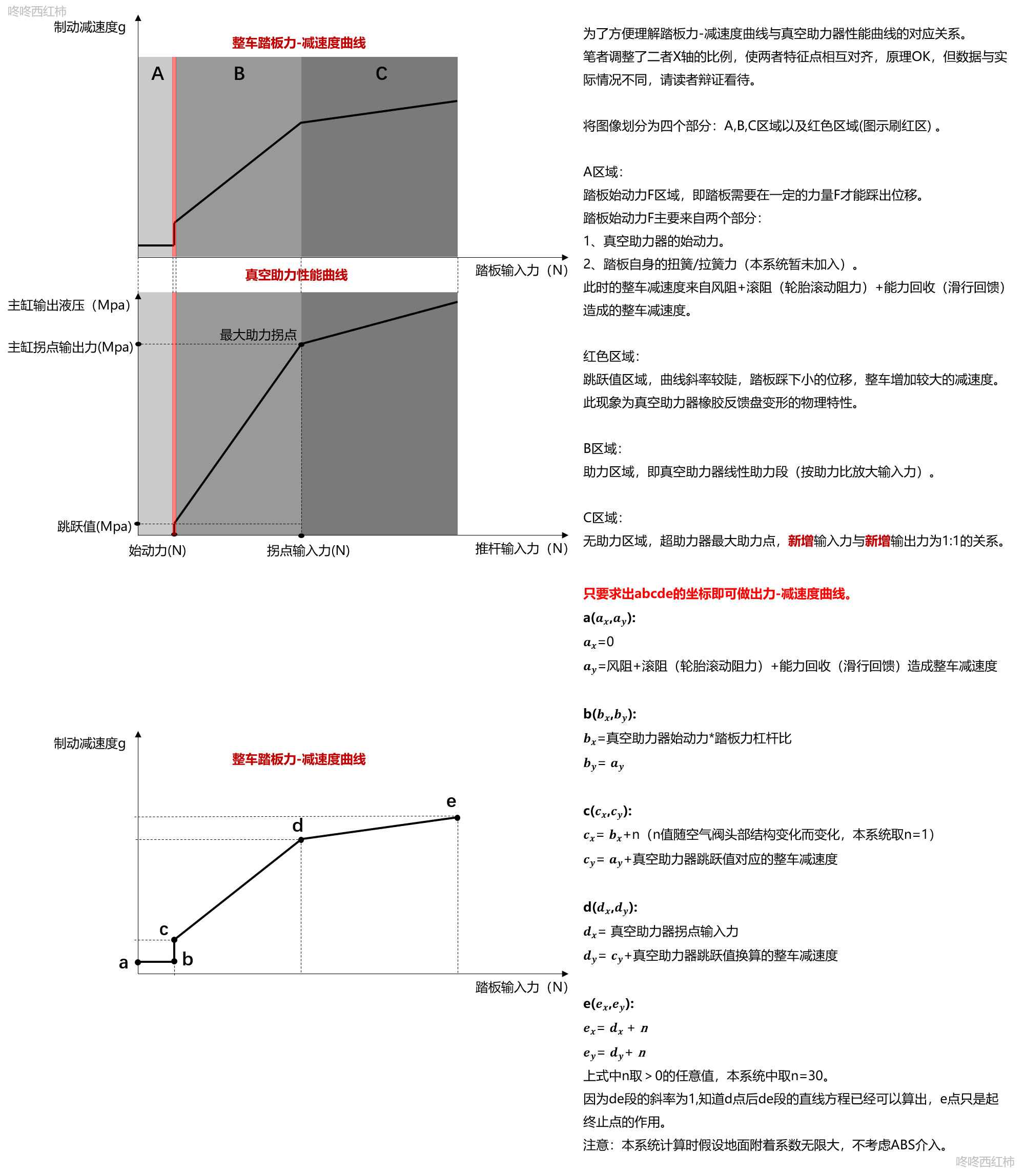
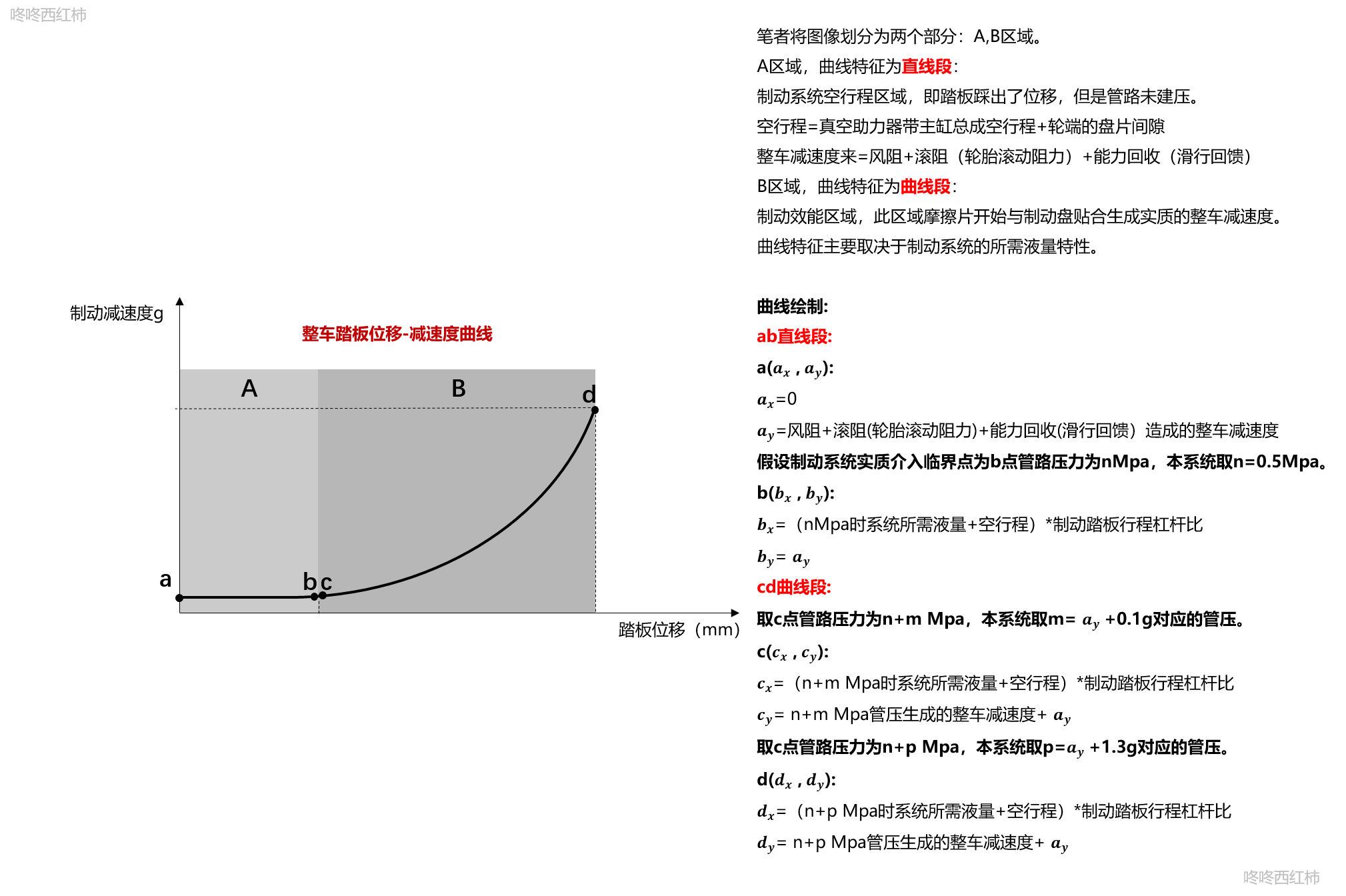
位移-减速度曲线
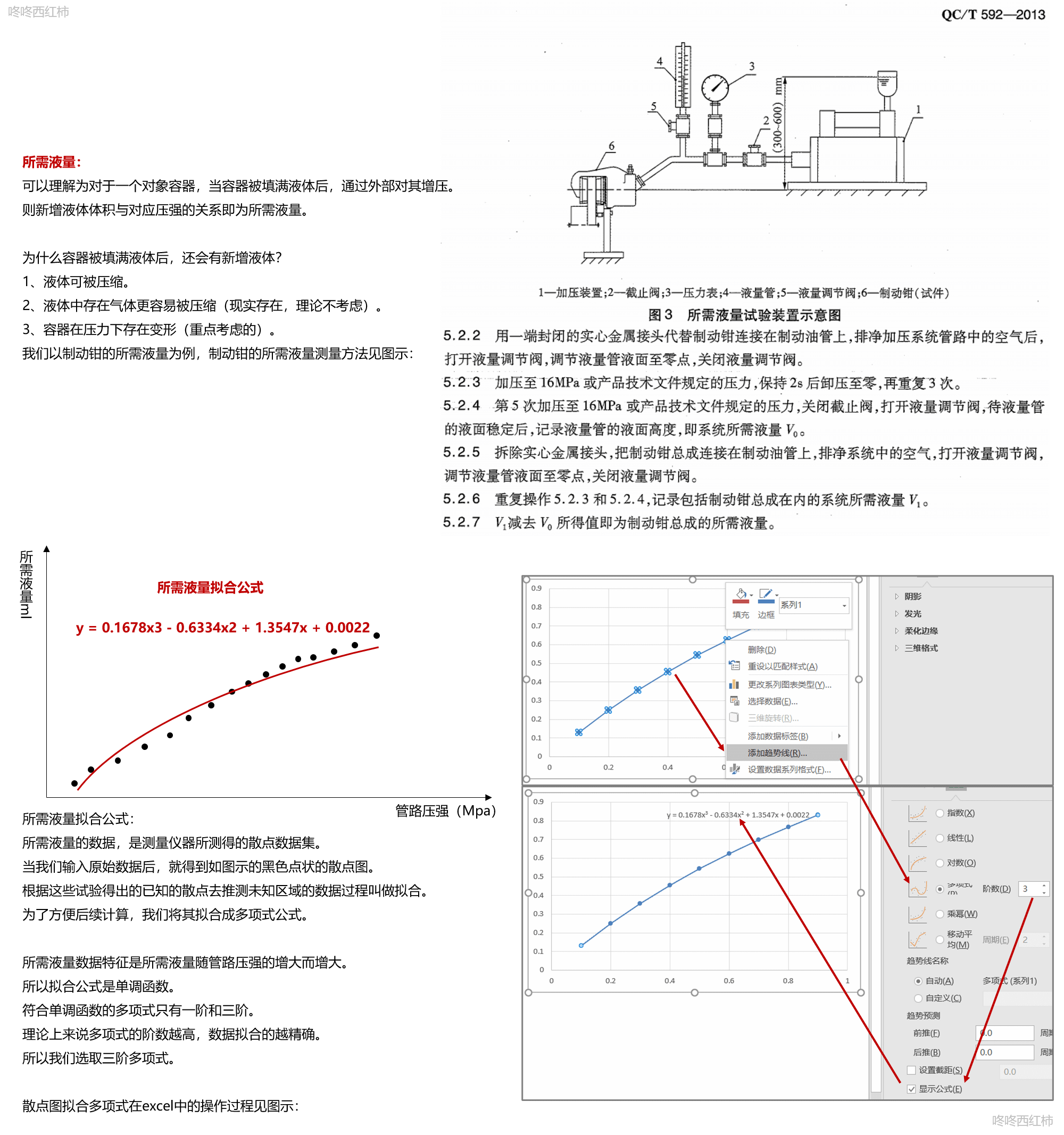
所需液量
制动系统空行程
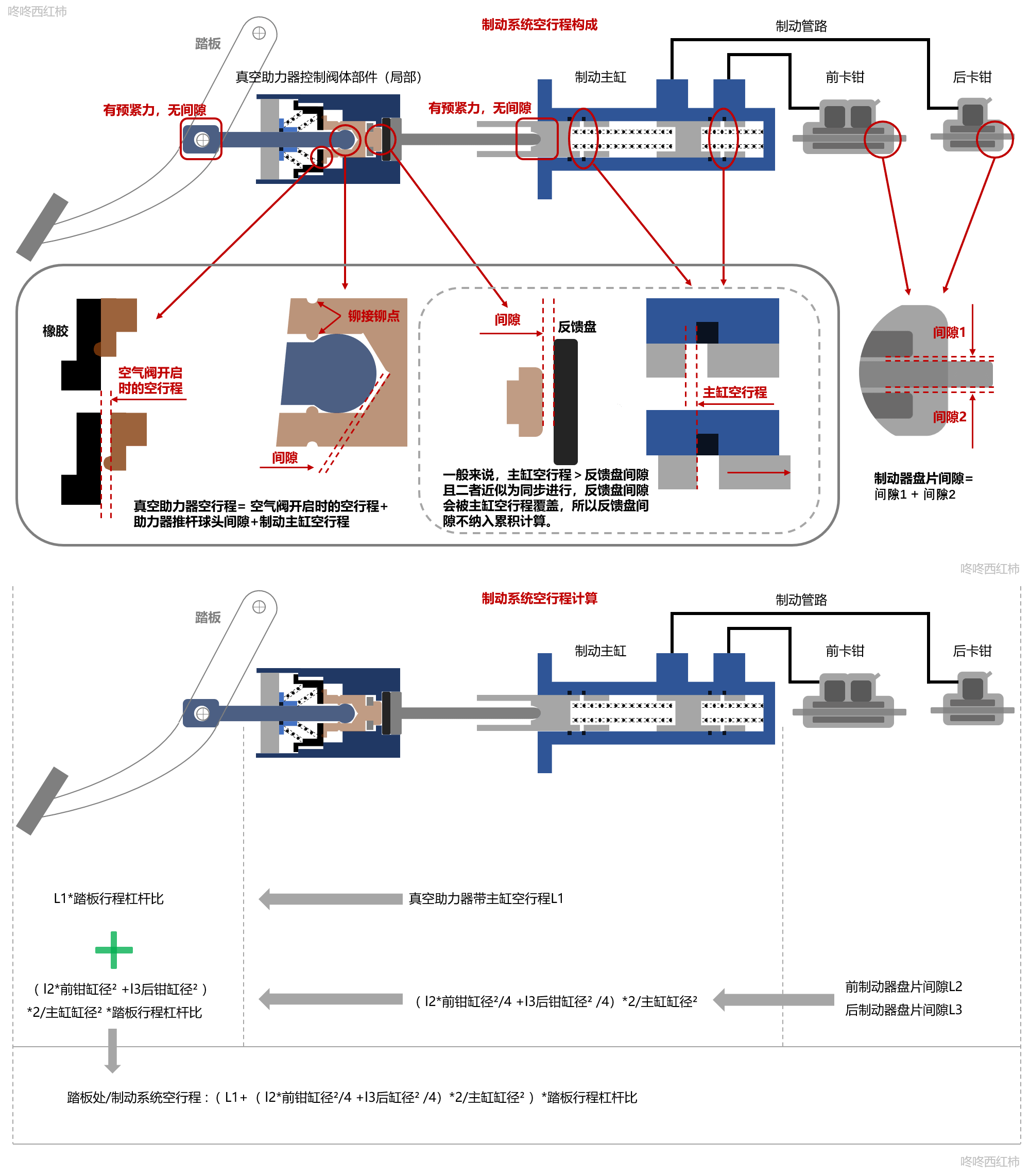
图示制动主缸为柱塞阀型主缸。
制动主缸根据QC/T 311-2018 规定M1类车辆≤2.5mm 实际工作中可根据供应商的实际情况进行商定。
整车制动液真空加注时,若主缸空行程太小(例0.05mm),抽真空时主缸活塞会在外界气压的作用下前移,可能导致制动回路封闭,导致制动液无法加注或加注困难。
---此案例可作为DFX(A)方法思维的体现。
所需液量踏板行程分布
前卡钳,后卡钳,管路的踏板行程计算方式是相同的:
压强&所需液量公式=>液量体积 液量体积/主缸缸径=>主缸位移 主缸位移/踏板位移杠杆比=>踏板位移
法规校核项解析
| 类别 | 项目 | 计算方法 |
|---|---|---|
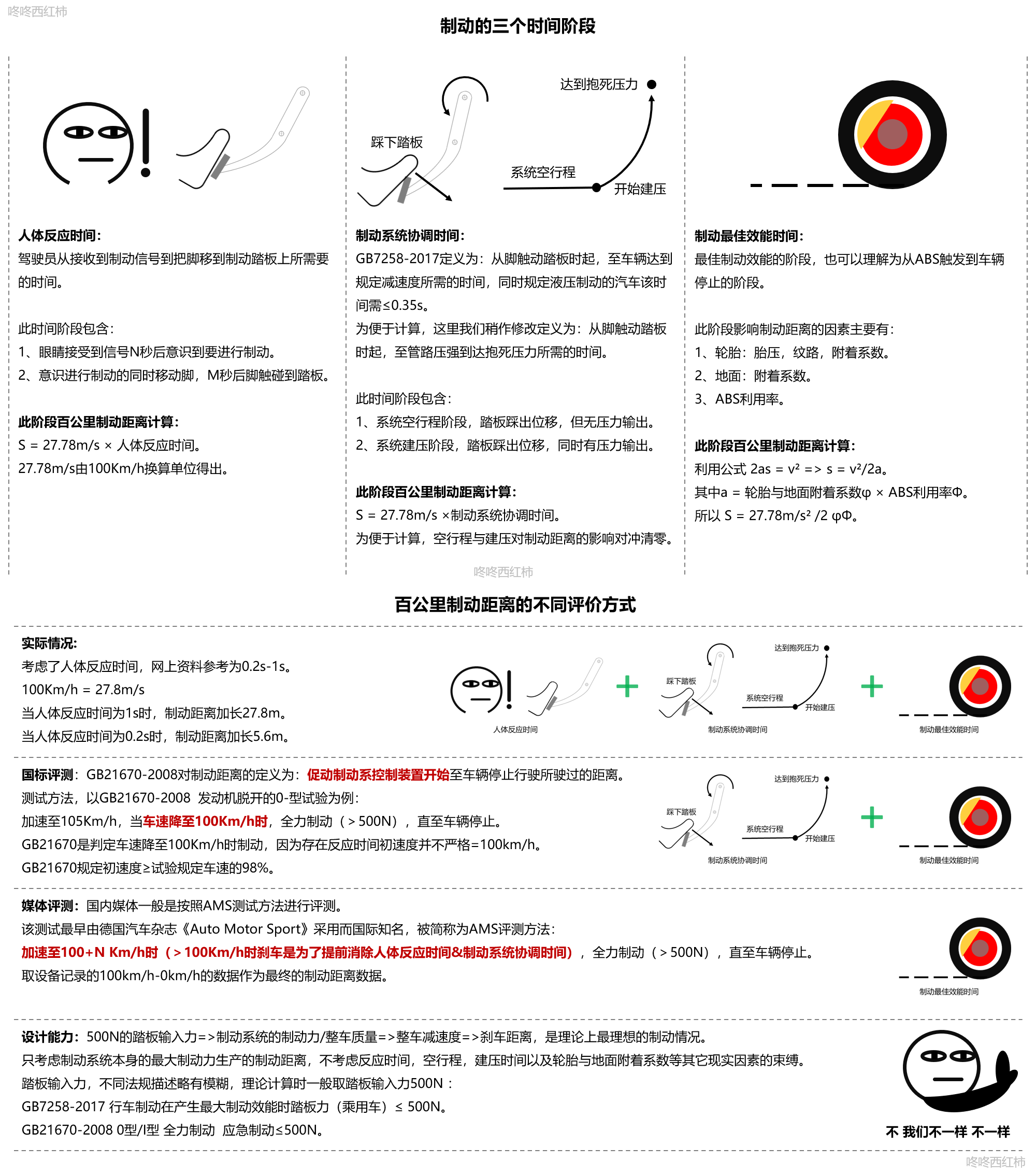
| GB21670 | 0型制动距离 | 参照百公里制动距离,国标评价的计算方法 |
| 单侧失效 | 500N踏板力=>管路压强=>单回路制动力=>整车减速度+制动协调时间=>制动距离 | |
| 助力失效 | 500N踏板力*力杠杆比*制动系统机械效率-助力器失效阻力=>管路压强=>制动力=>整车减速度+制动协调时间=>制动距离 | |
| 20%坡度驻车 | (下下行中)驻车制动力>整车质量×重力加速度g×sin(arctan(0.2)) | |
| 动态驻车-减速度 | (下行中)驻车制动力/整车质量 | |
| GB7258 | 驻车制动力 | 卡钳最大夹紧力×驻车静摩擦系数×有效制动半径×2/静力半径 |
此处的解释还有不少瑕疵。
例如0型制动距离没有考虑500N依然没有踩出ABS的情况---制动能力就太差劲了。
又例如单侧&助力失效没有考虑500N踩出ABS的情况---制动能力强的离谱了---太浪费,要降规格。
关于制动距离的计算,我也确实是一头包。目前只是考虑了最可能的情况,而且还有挺多因数没考虑,后面再优化吧,累啊 - - !
基础性能校核项解析
| 类别 | 项目 | 计算方法 |
|---|---|---|
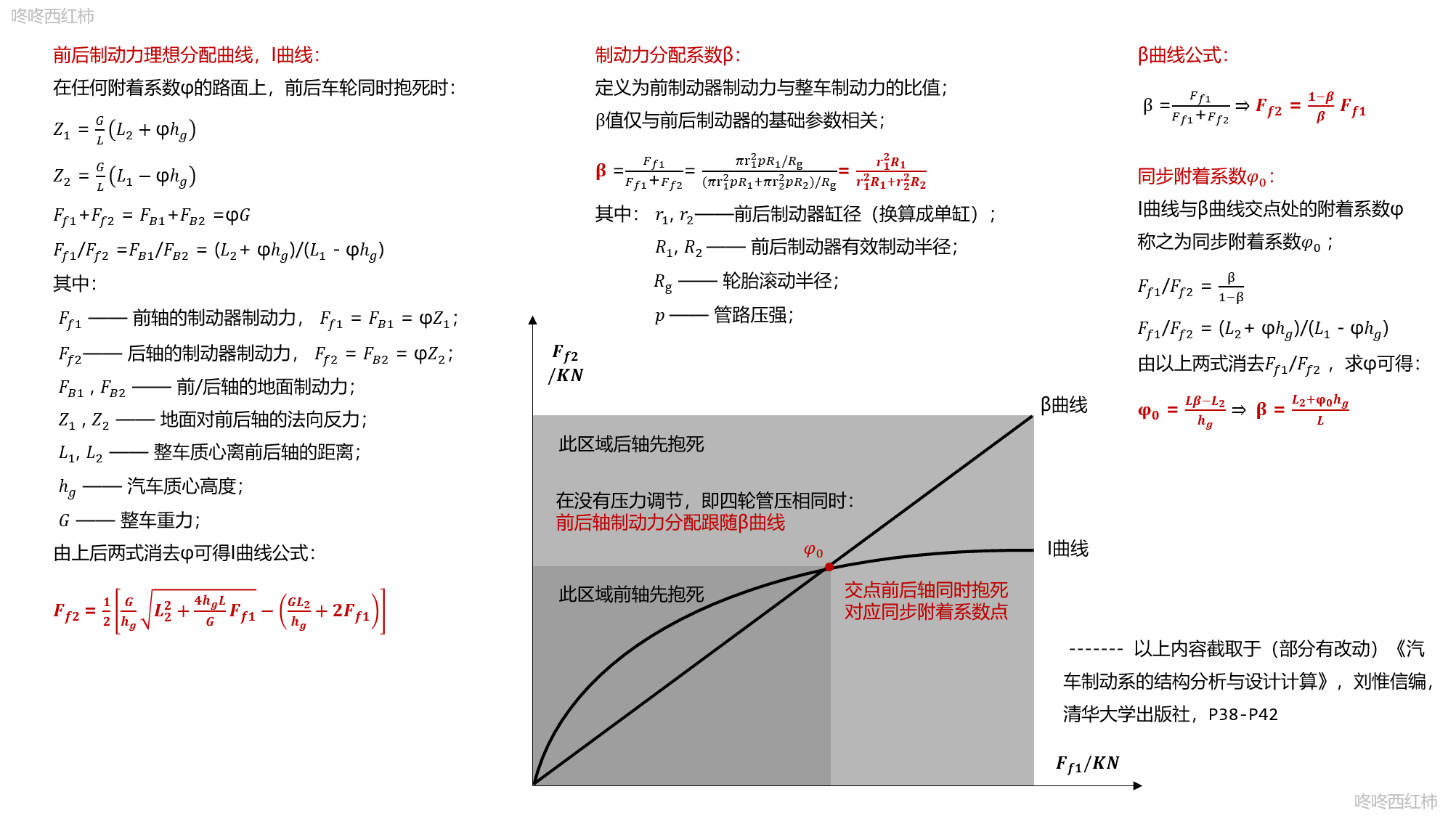
| 基础性能 | 制动力分配系数β | 参照I&β曲线中的计算公式 |
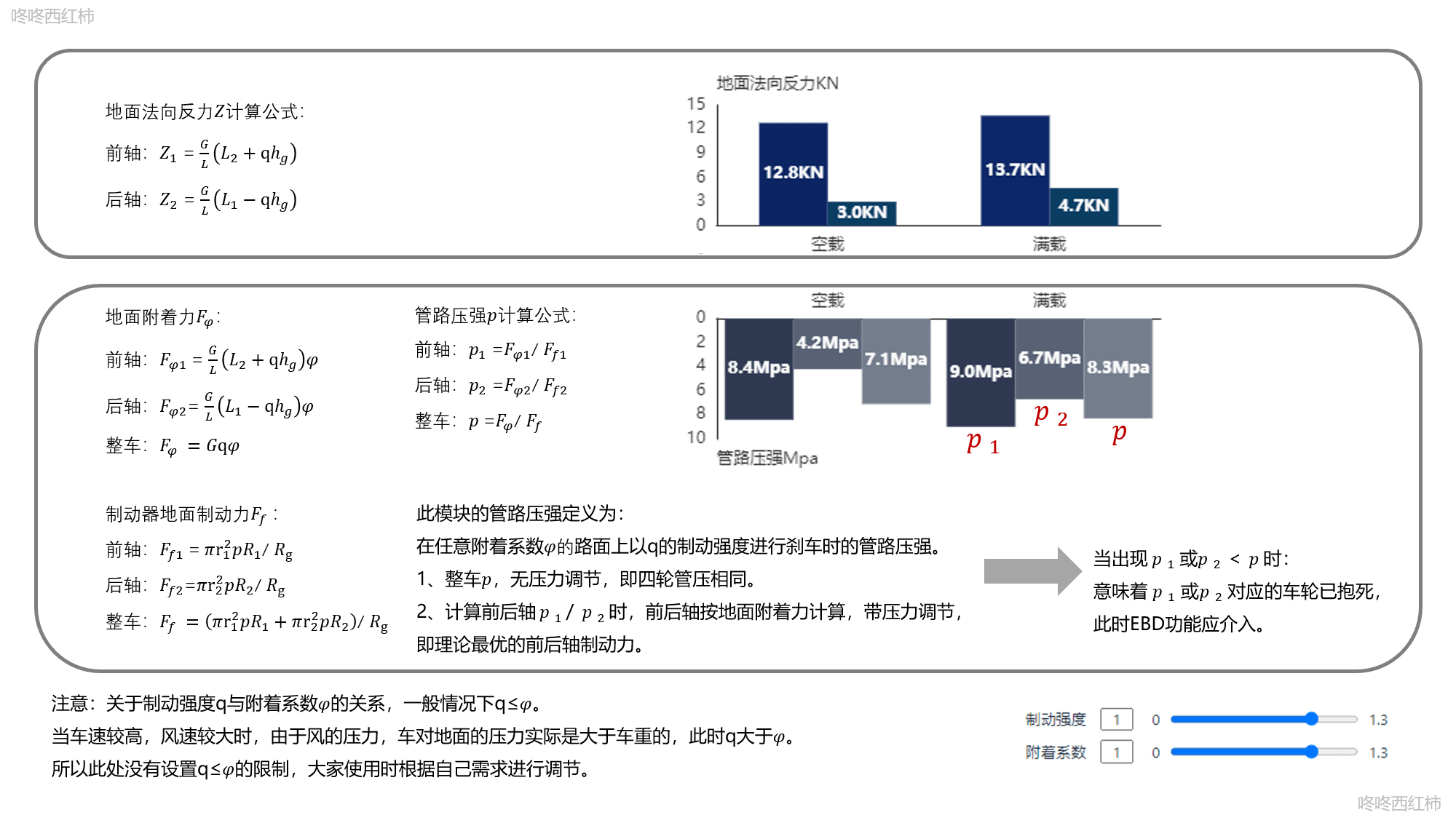
| 满载1g制动器抱死压力 | 1g时前后轴地面法向力(考虑轴荷转移)×地面附着系数=>前轴制动力=>前后轴管路压强 可参照“地面法向反力&管路压强”章节理解 |
|
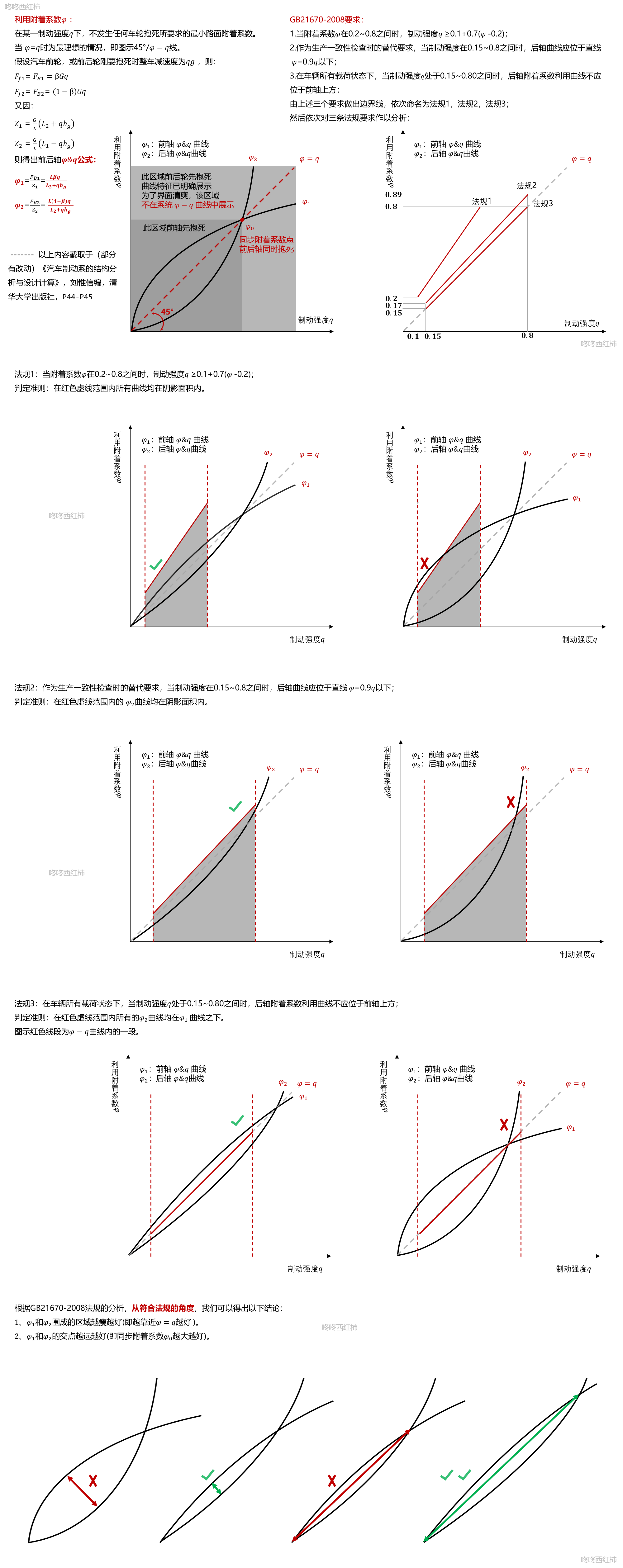
| 同步附着系数φ | 参照φ-q曲线中的计算公式 | |
| 摩擦片最小面积 | 参照下附图中的计算方式 | |
| 主缸行程校核满载1g | 1g时整车所需制动力=>管路压强(不考虑压力调节)=>所需液量=>主缸行程 可参照“地面法向反力&管路压强”章节理解 |
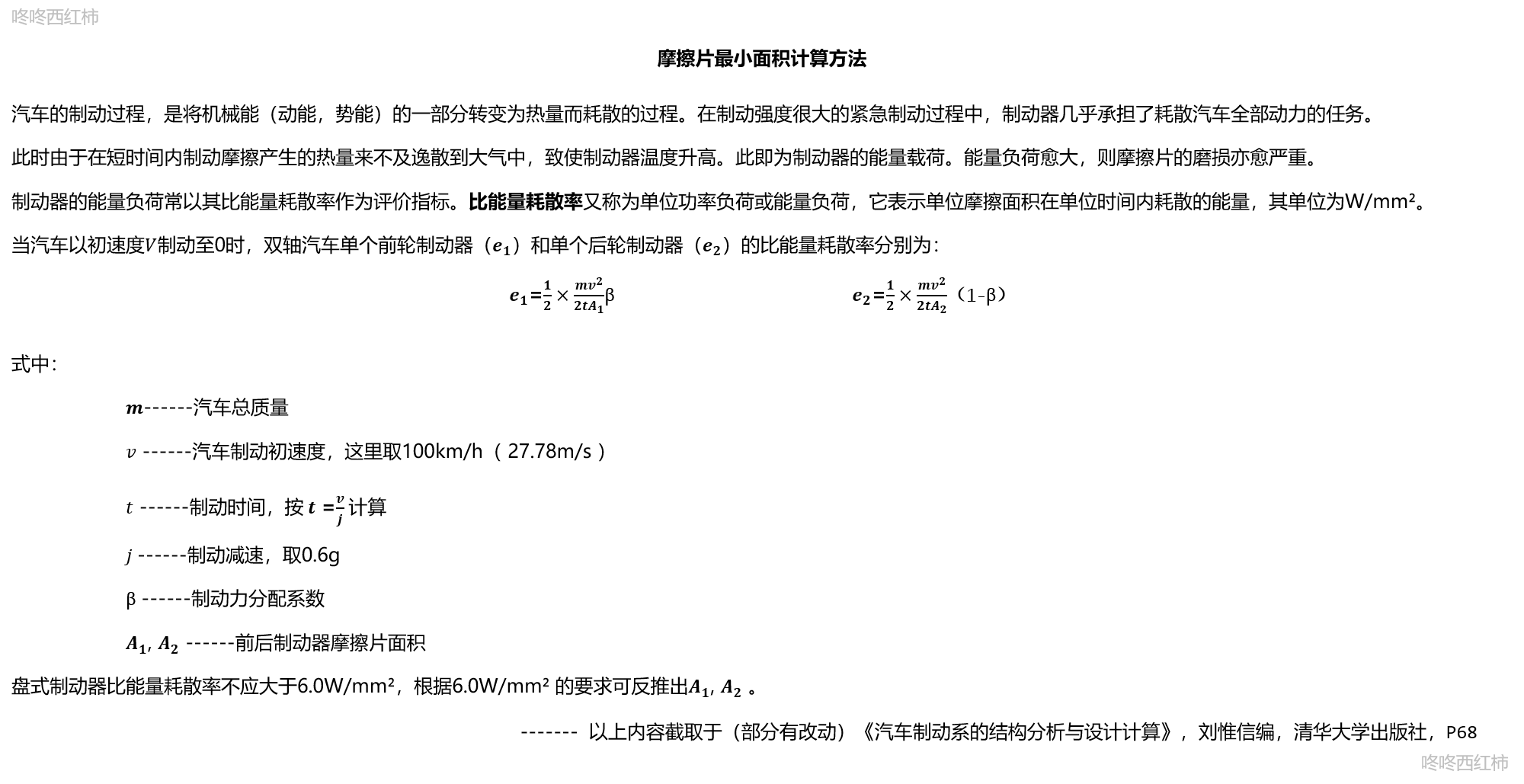
按照上图示方法计算出来的摩擦片面积通常余量过大(现在的摩擦片可以承受的比能量耗散率更高了?),实际上通常以满足台架试验要求作为判定标准。
百公里制动距离(空载)